Teoria pomiaru kątów osi zwrotnicy

W artykule tym wykorzystano materiały Hunter Engineering Company i SAE Technical Paper Series 850219
Teoria pomiaru kątów osi zwrotnicy
Publikacja ta ma charakter teoretyczny, co znaczy, że nie odwołuje się do przykładów konkretnych produktów lub rozwiązań technicznych sygnowanych markami producentów sprzętu pomiarowego.
Kąt wyprzedzenia osi obrotu (sworznia) zwrotnicy oznaczany jest w skrócie jako kąt WOZ lub WSZ. Doświadczenia ostatnich 20 lat dowodzą, że przy coraz bardziej precyzyjnych i skomplikowanych zawieszeniach pojazdów nieodzowne w pomiarach geometrycznych parametrów układów kierowniczych stają się tzw. przyrządy czterogłowicowe, mierzące ustawienie wszystkich czterech kół. Dlatego współczesne systemy pomiarowe odnoszą pomiar zbieżności kół skręcanych do wzdłużnej osi symetrii kół nieskręcanych. Także odniesienie kąta WOZ do osi symetrii kół nieskręcanych jest częścią koncepcji kompleksowego pomiaru geometrii kół pojazdu.
Kąt wyprzedzenia sworznia zwrotnicy a oś symetrii podwozia
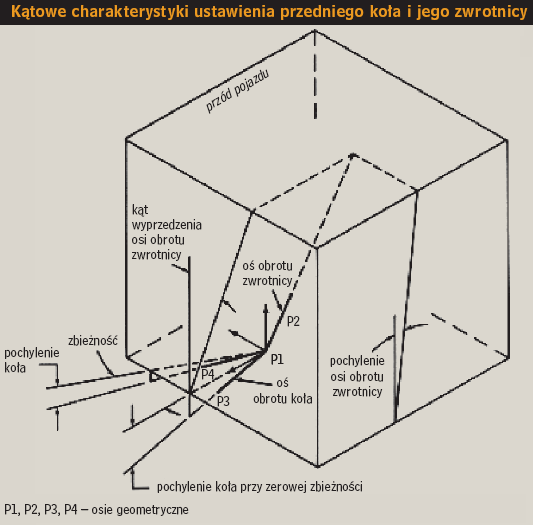
Teoretycznie kąt WOZ jest to rzut kąta zawartego między pionem a prostą pokrywającą się z osią obrotu zwrotnicy na boczną płaszczyznę pojazdu, tożsamą z płaszczyzną symetrii koła nieskręcanego. Kąt ten ma wartość dodatnią, gdy oś zwrotnicy jest pochylona swą górną częścią do tyłu, a ujemną przy nachyleniu odwrotnym. Podczas jazdy dodatni kąt WOZ stabilizuje układ kierowniczy poprzez generowanie równoważnych momentów dla obu kół osi kierowanej. Wartość tych momentów zależy od ramienia działania siły, czyli liniowej wartości wyprzedzenia, mierzonej pomiędzy punktami przecięcia poziomej płaszczyzny drogi przez oś obrotu zwrotnicy i oś pionowej symetrii koła. Ruch pojazdu jest stabilny, gdy kąty WOZ dla obydwu kół kierowanych są identyczne.
Momenty sił zmieniają się proporcjonalnie do kątów skrętu kół. Równoważą się przy neutralnej pozycji kierownicy. Przednie koła powinny wówczas kierować pojazd wzdłuż linii prostej. Przy prawidłowej geometrii całego podwozia ten prosty kierunek jazdy jest równocześnie osią symetrii układu tylnych kół niekierowanych. Jeśli linia symetrii kół tylnych przecina się z wzdłużną płaszczyzną symetrii pojazdu, neutralna pozycja układu kierowniczego nie powoduje już samoczynnego utrzymywania prostego kierunku jazdy (rys. 1).
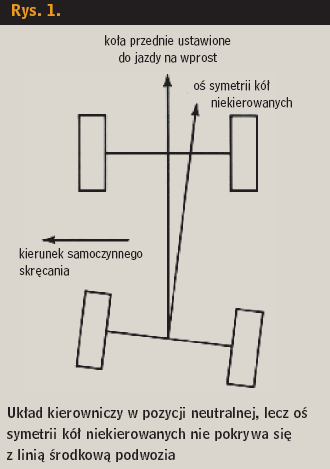
Pojazd skręca, dopóki kierowca nie skoryguje jego toru przez odpowiednie skręcenie kół przednich. Dlatego właśnie kąt WOZ musi być definiowany przy uwzględnieniu osi symetrii kół niekierowanych, czyli jako: leżący w płaszczyźnie bocznej równoległej do osi symetrii układu kół niekierowanych, zawarty pomiędzy osią obrotu zwrotnicy a pionową osią symetrii koła.
Tak uściślona definicja jest zgodna z zasadą kompleksowego ustawienia kół, w której poszczególne kąty zbieżności odnoszą się do osi symetrii kół tylnych.
Metodologia pomiaru kąta wyprzedzenia sworznia zwrotnicy
Kąt WOZ nie może być mierzony bezpośrednio, ponieważ nie da się zamocować głowicy pomiarowej na abstrakcyjnej osi obrotu zwrotnicy, a instalowanie dodatkowych przyrządów pośrednich wydłużałoby i komplikowało procedury pomiarowo-regulacyjne. Łatwiej jest kąt ten wyliczyć na podstawie różnic zmierzonych kątów pochylenia koła (PK) przy zmianach jego zbieżności.
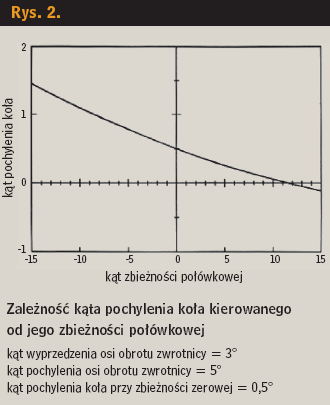
Kąt PK kół skręcanych jest bowiem determinowany przez kąty: WOZ, pochylenia osi zwrotnicy POZ (leżący w poprzecznej płaszczyźnie pionowej) i zbieżności (połówkowej).
Przykład zmiany kąta PK w funkcji kąta zbieżności przedstawia wykres nr 2.
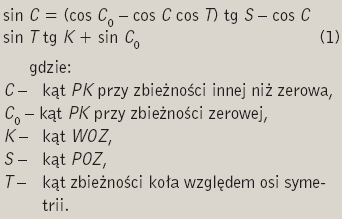
Procedura pomiaru kąta WOZ polega na pomiarach kątów PK (C1 i C2) przy dwóch kątach zbieżności (T1 i T2). Po podstawieniu wartości (C1, T1) oraz (C2, T2) do równania (1) otrzymujemy:
Gdy od równania (2) odejmiemy stronami równanie (3) otrzymamy:
W równaniu (5) nie występuje wartość kąta pochylenia koła przy zerowej zbieżności (C0), więc nie trzeba jej mierzyć dla wyliczenia kąta WOZ (K).
Na wynik równania (5) wpływa wartość kąta POZ (S). Uzależnienie od kąta POZ może stać się mało istotne, jeżeli wprowadzimy jedno ograniczenie i jedno przybliżenie w procedurze. Otóż kąty PK i ich zmiany na skutek skręcania kół w trakcie procedury pomiaru WOZ są niewielkie, zwykle nie przekraczają 2o. Można więc przyjąć w przybliżeniu, że cos C = 1. Błąd wyniesie wówczas najwyżej 0,06%, a równanie (5) da się skrócić do postaci:
Wspomniane ograniczenie polega na tym, że skręt podczas pomiaru jest symetryczny względem toru jazdy kół niekierowanych pojazdu, tj. T2 = –T1. W trakcie procedury należy najpierw skręcić kołami w lewo o kąt zbieżności T1 i zmierzyć C1, następnie skręcić w prawo o kąt zbieżności T2 = –T1 i zmierzyć C2.
Zgodnie z przyjętym ograniczeniem otrzymujemy wzór:

Równanie (7) pozwala wyliczyć kąt WOZ bezpośrednio z pomiarów zbieżności. Wyliczenia można jeszcze bardziej uprościć, przyjmując, że:
![]()
Jest to całkowicie dopuszczalne przy małych wartościach kątów, występujących zwykle w pomiarach kąta WOZ. Po podstawieniu tych zmian równanie (7) przybiera ostateczną postać:

Ograniczenia procedury
Powyżej opisana procedura pomiaru i wyliczania kąta WOZ jest właściwa w odniesieniu do toru jazdy zgodnego z osią symetrii niekierowanych kół pojazdu. Powinny być przy tym zachowane następujące warunki:
- kąty zbieżności T1 i T2 muszą być zmierzone względem osi symetrii kół niekierowanych,
- zmiany kąta skrętu są symetryczne względem osi jazdy, tj. T2 = –T1.
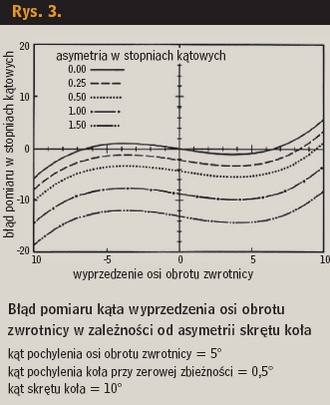 |
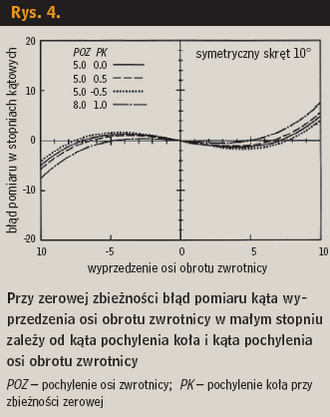
Gdy warunki te nie są spełnione, a zwłaszcza skręt nie jest symetryczny, to drugi człon równania (6), ten zawierający kąt POZ (tg S), nie będzie równy 0. Powstaje rozbieżność pomiędzy pomiarami kątów POZ i WOZ, a unieważnieniu ulegają równania (7) i (8). Procedura pomiaru kąta WOZ przy skręcie wyznacza ten kąt na płaszczyźnie dzielącej na pół całkowity kąt skrętu koła przy tym pomiarze. Jeżeli oś symetrii układu jezdnego nie jest równoległa do płaszczyzny podziału skrętu, wyznaczony kąt nie może być kątem WOZ. Można to zrozumieć intuicyjnie. W równaniu (8) kąt WOZ jest wyliczany z różnic w kątach PK (C1 – C2), każde koło jest skręcane pod kątem T2 – T1, przy założeniu, że T2 = –T1. Jeśli kąty skrętu mają tę samą wartość, ale są asymetryczne, wynikające z nich zmiany kąta PK będą różne, ponieważ nie zachodzą one proporcjonalnie do kąta zbieżności (patrz wykres 2). Przy takim błędzie kąt WOZ, choć regulowany identycznie dla obydwu kół, przybierze różne wartości na płaszczyznach równoległych do osi symetrii tylnych kół. Może to powodować tzw. ściąganie pojazdu podczas jazdy na wprost, zwłaszcza przy różnicach rzędu 20 – 30’ i precyzyjnej konstrukcji zawieszenia. Teoretyczną dokładność pomiaru (obliczenia) kąta WOZ według równania (8) przedstawiają wykresy 3 i 4. Pierwszy z nich określa błąd mierzonego kąta dla kilku wartości asymetrycznego skrętu. Na drugim uwidacznia się błąd w pomiarze WOZ przy kilku różnych kombinacjach POZ i PK. Praktyczne pomiary kąta wyprzedzenia Praktyczne prowadzenie pomiaru WOZ opisaną metodą najłatwiej jest realizować za pomocą elektronicznych urządzeń pomiarowych, mierzących na bieżąco zmiany zbieżności względem toru jazdy i pochylenia koła podczas wykonywanych skrętów. Zwykle procedura zaczyna się od skrętu koła w lewo o określony kąt, zazwyczaj 10 do 15o, oraz pomiaru i zapisu kątów PK i zbieżności (C1 i T1). Koło jest następnie skręcane w prawo do przeciwnego kąta (T2 = –T1), a kąt PK i zbieżność są rejestrowane ponownie (C2 i T2). Po powrocie kół do pozycji neutralnej wylicza się kąt WOZ z równania (8). |
 |
Ta procedura mierzy kąt WOZ tylko dla jednego koła, tego skręconego pod właściwym kątem. Jeśli lewe koło jest skręcone pod właściwym kątem, a kąt PK i zbieżność są wtedy rejestrowane dla obu kół, należy się spodziewać, że prawy kąt WOZ będzie ustalony błędnie, z powodu asymetrycznego skrętu. Jest to skutek działania trapezu kierowniczego i różnej od zera całkowitej zbieżności kół.
Ten błąd może być eliminowany przez zastosowanie pewnej sekwencji skrętów: skręcamy lewe koło w lewo pod właściwym kątem, mierząc zbieżność i PK, potem prawe koło (skręcone w lewo, ale pod niewłaściwym kątem) doprowadzamy do właściwego kąta skrętu i rejestrujemy jego parametry (PK i zbieżność). Następnie skręcamy prawe koło pod właściwym kątem w prawo i dokonujemy stosownych pomiarów. Koło lewe, skręcone też w prawo, doprowadzamy do właściwego kąta skrętu i rejestrujemy parametry.
Na początku i na końcu procedury doprowadzamy koła do pozycji neutralnej z uwzględnieniem właściwego toru jazdy wyznaczonego przez koła tylne, aby uniknąć pomiaru kąta WOZ w niewłaściwej płaszczyźnie.
Potencjalnym źródłem błędów w tej procedurze jest histereza układu kierowniczego, spowodowana sprężystymi połączeniami jego elementów. Pewną sprężystością odznaczają się też zawieszenia, opony i obrotnice, na których stoją koła kontrolowanego pojazdu. Błędne wskazania sprawnych urządzeń pomiarowych mogą wynikać z nadmiernych oporów ruchu zanieczyszczonych obrotnic. Także jakiekolwiek ponadnormatywne luzy w zawieszeniu muszą być usunięte! Podczas skręcania kół należy zawsze przekraczać nieco prawidłowy kąt, a następnie wracać do niego z dokładnością do 1/4o, przy wykorzystaniu energii elementów sprężystych, co minimalizuje naprężenia i wspomnianą histerezę. Przy powodowanym histerezą błędzie pomiaru PK rzędu 0,05o i kącie skrętu 10o:
Pomiary za pomocą obrotnic
Możliwe jest również mierzenie kąta WOZ prostszymi przyrządami, ale trzeba się liczyć z mniejszą dokładnością pomiaru i ustalania symetrii skrętu. Metoda ta polega na skręcaniu kół pod odpowiednimi kątami przy równoczesnej obserwacji skal obrotnic. Po osiągnięciu zamierzonego kąta skrętu koła należy zapisać wartość kąta PK. Jest jednak kilka wad tej metody.
Pierwszą jest ewentualna niezgodność odczytu ze skali obrotnicy ze zbieżnością względem toru jazdy kół tylnych. Zjawisko to można złagodzić prostymi zabiegami. Należy w tym celu podnieść przednie koła z obrotnic i ustawić je tak, by miały równą zbieżność połówkową względem toru jazdy kół tylnych.
Talerze obrotnic przekręca się do osiągnięcia na ich skalach ustalonych zbieżności kół. Następnie opuszcza się przednie koła i odpręża, a potem można już wykonywać odpowiednie skręty potrzebne dla ustalenia kąta WOZ. Problem stanowić może zmiana zbieżności podczas podnoszenia i opuszczania kół.
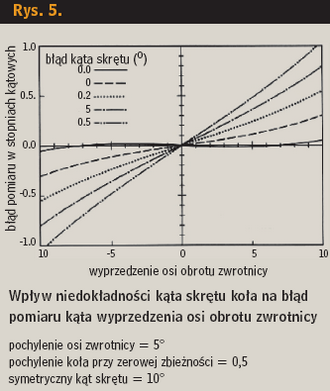
Inne wady tej metody to zwiększony efekt histerezy podczas ręcznego obracania kół chwytanych za opony, bez użycia kierownicy, a także brak możliwości bieżącego pomiaru kątów zbieżności. Wyliczenia dokonywane przez system pomiarowy są prawidłowe tylko wtedy, gdy operator skręca koła pod odpowiednimi kątami. Jeżeli kąt PK nie jest mierzony przy właściwym kącie skrętu, kąt WOZ zostanie wyliczony błędnie (wykres 5).
Błędy te mogą być w większości wyeliminowane dzięki dodatkowemu wyposażeniu obrotnic w czujniki skrętu. Wtedy oprogramowanie urządzenia pozwoli powiązać kąt skrętu z aktualnym kątem zbieżności, a tym samym – uniknąć niepożądanego etapu podnoszenia kół.
Rozwiązaniem współcześnie stosowanym jest przeniesienie funkcji pomiaru kąta skrętu do głowicy pomiarowej i połączenie jej z pomiarem i monitorowaniem zbieżności. W takim przypadku należy tylko zadbać, by zwykła mechaniczna obrotnica charakteryzowała się małymi oporami ruchu pod obciążeniem i odpornością na korozję.
Mechaniczne systemy pomiarowe
Mechaniczne przyrządy przeznaczone do kompleksowych pomiarów i ustawień wszystkich 4 kół mogą być używane do pomiaru kąta WOZ opisaną metodą.
Stosowana w nich zasada pomiaru kąta PK polega na obróceniu skali z poziomnicą o taki kąt, by pęcherzyk powietrza znalazł się idealnie na środku, i odczytaniu wartości na kątowej skali. Do obliczenia kąta WOZ można użyć przekształconego równania (8):
Kąt pochylenia sworznia zwrotnicy
Kąt POZ jest definiowany w sposób podobny do kąta WOZ, czyli jako: kąt prostopadły do osi symetrii kół nieskręcanych, zawarty pomiędzy osią obrotu zwrotnicy a przecinającą ją linią pionową. Przybiera wartość dodatnią, gdy oś obrotu zwrotnicy jest skierowana swą górną częścią ku wnętrzu pojazdu, a ujemną (niestosowaną w praktyce) przy ustawieniu odwrotnym. Kąt POZ jest więc podobny do kąta WOZ, ale mierzy się go w płaszczyźnie prostopadłej do osi symetrii układu jezdnego. Jego wartość można obliczać na podstawie zmian rejestrowanych podczas skręcania koła. Służą do tego przetworniki PK zamocowane pod kątem 90o w stosunku do ich zwykłego ustawienia. Dodatkowym wymogiem jest wówczas zblokowanie przetwornika z kołem i zablokowanie koła hamulcem. Kąty WOZ i POZ mogą być mierzone równocześnie podczas opisanej procedury pomiarowej, jeśli urządzenie wyposażone jest zarówno w przetworniki PK, przeznaczone m.in. do obliczeń kąta WOZ, jak też obrócone o 90° przetworniki PK, potrzebne do obliczania kąta POZ.
Wprowadzenie opisanej metody do urządzeń wykorzystujących cyfrowe techniki przetwarzania danych przyniosło w efekcie znaczną poprawę dokładności i powtarzalności pomiarów.

0 komentarzy dodaj komentarz