Aktywny układ kierowniczy

Fot. Aktivlenkung
Rozwiązanie to, opracowane wspólnie przez Dział Układów Kierowniczych ZF - Aktivlenkung Gmbh i BMW, zastępuje dotychczasowe kompromisy pomiędzy sportową a komfortową konstrukcją układu kierowniczego.
Ponieważ Aktivlenkung Gmbh jest spółką Robert Bosch Gmbh i ZF Freiedrichshafen AG, stwierdzić należy, iż nowa konstrukcja, zdecydowanie zwiększająca komfort i aktywne bezpieczeństwo jazdy, jest efektem współpracy aż trzech wiodących firm motoryzacyjnych. W aktywnym układzie kierowniczym jako rozwiązanie bazowe wykorzystano znany już z wielu komfortowych zastosowań system ZF Servo tronik.
Zasadnicze funkcje
Aktywny układ kierowniczy składa się: z hydraulicznej przekładni zębatkowej, mechanizmu planetarnego, silnika elektrycznego, kilku czujników oraz urządzenia sterującego. Dodatkowy stopień swobody umożliwia ciągłe, zależne od sytuacji, optymalizowanie zmiany przełożenia układu kierowniczego, komfortu, wysiłku i wygody kierowcy. W zależności od warunków na drodze kąt skrętu kół jest zwiększany, względnie zmniejszany w stosunku do wymuszanego przez kierowcę na kole kierownicy ruchu kątowego.
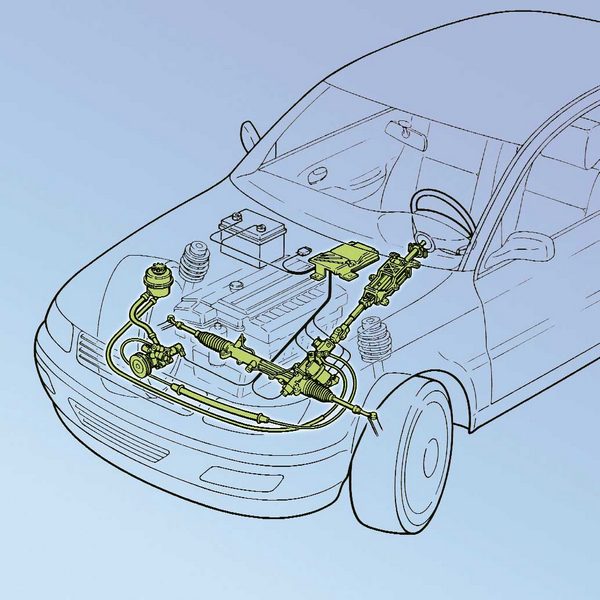
Rys. 1. Rozmieszczenie podzespołów aktywnego układu kierowniczego ZF
Podczas jazdy z małą prędkością, np. w mieście, wymagana jest stała duża siła skręcająca na kole kierownicy. Jej zmniejszenie uzyskuje się dzięki zastosowaniu silnika elektrycznego współpracującego z układem planetarnym, co powoduje mniejsze ruchy kątowe kierownicą, dające pożądane kąty skrętu kół, jednocześnie zmniejszając siłę wywieraną przez kierowcę.
Natomiast przy dużych prędkościach samochodu kierowca w przypadku wykonania zbyt gwałtownego ruchu kierownicą nie musi się obawiać utraty przyczepności kół, gdyż zastosowany silnik elektryczny z układem planetarnym powoduje odpowiednie zmniejszenie kąta skrętu kół. Gdy silnik elektryczny nie jest aktywny, koło kierownicy działa bezpośrednio na główną przekładnię kierowniczą, jak w konwencjonalnym układzie kierowniczym, powodując proporcjonalny skręt kół. Dzięki temu możliwa jest również interwencja kierowcy w pracę samoczynnie działającego systemu.
System ten jest w sposób ciągły nadzorowany przez kompleksowy układ czujników, zapewniających bezpieczeństwo jazdy. Jeżeli zaistnieje konieczność jego wyłączenia, pojazd korzysta jedynie z normalnej zębatkowej przekładni kierowniczej ze wspomaganiem.
System aktywnego sterowania jest pierwszym krokiem do całkowicie samoczynnych układów kierowniczych. Jego zadowalające działanie opiera się na wysokiej jakości poszczególnych elementów. Dotyczy to również ich dostosowania do rozmaitych warunków zewnętrznych.
Budowa i działanie
Elektronicznie sterowany, zależny od prędkości jazdy, zębatkowy, wspomagany hydraulicznie układ kierowniczy (rys. 2) wymaga w czasie postoju i przy małych prędkościach jazdy, np. podczas parkowania lub opuszczania parkingu, małych sił na kole kierownicy. Przy większych prędkościach zwiększa się siła potrzebna do obracania koła kierownicy, dzięki czemu kierowca ma lepsze wyczucie kontaktu kół z nawierzchnią, co ułatwia mu dokładne dostosowywanie się do warunków drogowych. Omawiany aktywny system kierowniczy (rys. 3) jest umieszczony między dwupołożeniowym serwozaworem z suwakiem obrotowym (2) a obudową głównej przekładni kierowniczej (1). Ponadto połączony jest z różnicową przekładnią planetarną (4), mającą dwa wałki wejściowe i jeden wyjściowy. Jednostka ta przenosi moment skrętu zarówno z koła kierownicy przez kolumnę kierowniczą i dwupołożeniowy serwozawór z suwakiem obrotowym, jak też z silnika elektrycznego (3) na zębnik głównej przekładni zębatkowej. To oznacza, że dzięki różnicowej przekładni (4) na przekładnię główną przekazywany jest wypadkowy moment obrotowy.
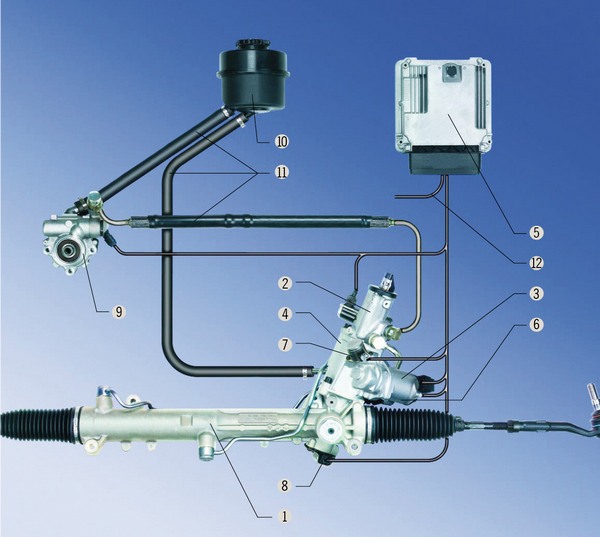
Rys. 2. Schemat układu ZF-Servotronic 2
1. przekładnia zębatkowa, 2. elektrozawór wspomagania hydraulicznego, 3. silnik elektryczny, 4. przekładnia różnicowa, 5. sterownik elektroniczny, 6. czujnik kąta obrotów silnika, 7. blokada elektromagnetyczna, 8. czujnik kąta obrotu zębnika, 9. pompa hydrauliczna, 10. zbiornik płynu, 11. przewody hydrauliczne, 12. przewody elektryczne
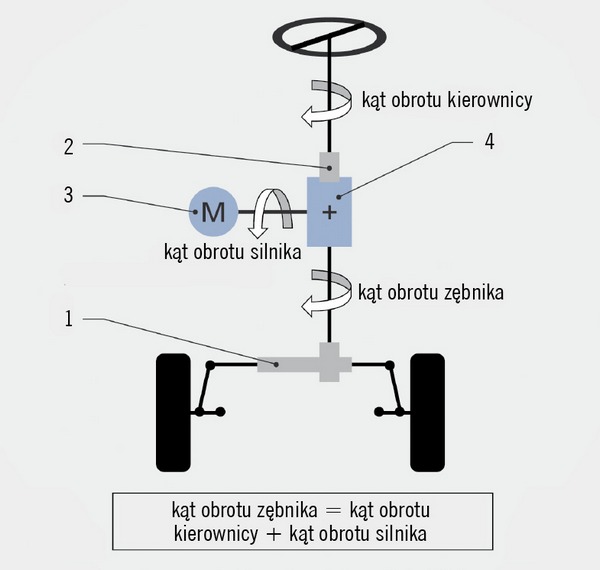
Rys. 3. Zasada działania układu
Współdziałanie mechaniki, elektrotechniki i elektroniki
Czujniki kąta obrotu silnika (6) (rys. 4) i kąta obrotu koła zębatego (8) dostarczają do sterownika elektronicznego (5) (rys. 2) sygnały pozwalające rozpoznać wypadkowy kąt obrotu zębnika (10) (rys. 4) głównej przekładni kierowniczej.
Planetarna przekładnia różnicowa jest głównym dodanym elementem systemu aktywnego kierowania ZF. Generuje ona poprzez dodatkowy kąt obrotu silnika kinematyczne nakładanie się tego ruchu na kąt skrętu układu kierowniczego. Silnik elektryczny i planetarny mechanizm różnicowy są w stanie w ułamkowych częściach sekundy realizować wygenerowane przez układ elektroniczny funkcje korekcyjne, stosownie do zaistniałych warunków jazdy, a kierowca nie odczuwa tych zmian podczas prowadzenia pojazdu.
Silnik jest w sposób stały połączony ze ślimakiem (4) (rys. 4) i zazębia się bez luzów ze ślimacznicą (8), trwale połączoną z dwutarczowym jarzmem (5) i trzema satelitami (9). Kierunek obrotu, liczba obrotów i czas pracy silnika są kontrolowane przez czujnik jego obrotów (6). Satelity zapewniają mechaniczne połączenie z górnym (wałkiem zaworu dwupołożeniowego suwaka obrotowego) i dolnym osiowym kołem środkowym. Dolne koło osiowe połączone jest z zębatką (10). Dzięki temu zapewnione jest bezpośrednie przeniesienie napędu z serwotronika (2) do listwy zębatej (1) w obydwu kierunkach.
 |
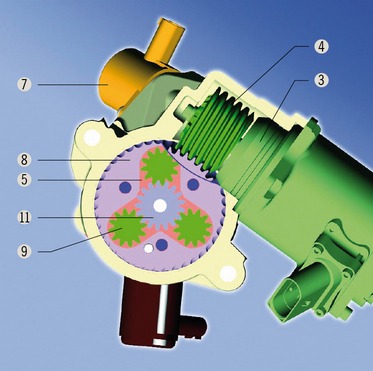 |
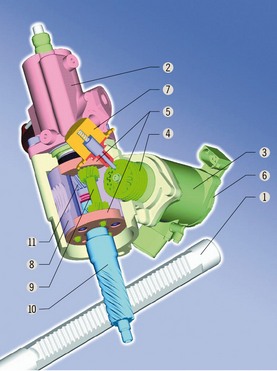
Rys 4 i 5. Przekroje różnicowej przekładni planetarnej
1. listwa zębata, 2. elektrozawór wspomagania hydraulicznego, 3. sil-nik elektryczny, 4. ślimak, 5. korpus przekładni różnicowej, 6. czujnik obrotów silnika, 7. blokada elektromagnetyczna, 8. ślimacznica, 9. satelity, 10 zębnik, 11. koło słoneczne (osiowe)
Przy ruchu ślimacznicy wywołanym silnikiem elektrycznym koła satelitarne współpracują z obydwoma kołami osiowymi. Z uwagi na różnicę liczby zębów kół satelitarnych zazębiających się z górnym i dolnym kołem osiowym powstaje ruch względny tych kół. Zatem obrót koła kierownicy oraz ślimacznicy są ze sobą sumowane i przeniesione poprzez zębnik na listwę zębatą głównej przekładni kierowniczej.
W wyniku przesuwu listwy zębatej uzyskujemy pożądane dodatkowe skręcenie kół kierowanych w stosunku do ruchu koła kierownicy. Jest ono przy zgodnym ruchu górnego i dolnego koła osiowego mniejsze (ujemne), a przy braku zgodności większe (dodatnie) od położenia podstawowego, gdy nie działa silnik elektryczny. Samohamowność przekładni ślimakowej zapewnia, iż obrót ślimaka może być wywoływany tylko przez silnik. Oprócz tego przypadkowe obroty silnika uniemożliwia elektromechaniczna blokada (7) (rys. 5).
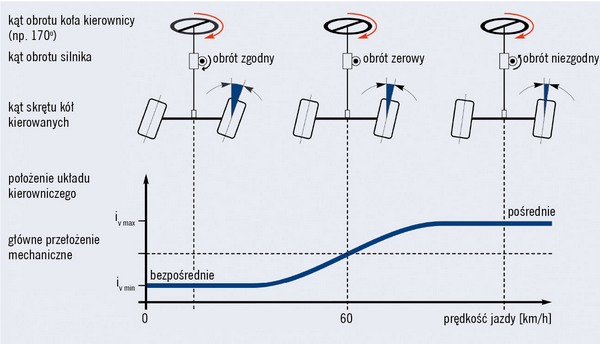
Rys. 6. Schemat zależnego od prędkości jazdy przełożenia układu kierowniczego z zastosowaniem ZF-Activlenkung
Urządzenie sterujące zapewnia połączenie elektrycznej sieci pojazdu, jego czujników, jak i serwomechanizmów korygujących. Wszystkie niezbędne zespoły elektroniczne są połączone z pakietem płyt drukowanych. Układ ten jest przystosowany do pracy w zakresie temperatur –40 do +85°C. Głównymi jego elektronicznymi elementami są dwa wysokosprawne, 32-bitowe mikroprocesory, które analizują sygnały otrzymane od czujników układu kierowniczego i obliczają wielkość korygowanego kąta skrętu, realizowaną następnie za pomocą impulsów wysyłanych do urządzeń wykonawczych. Potrzebne dane są przekazywane przez czujniki z prędkością sto razy na sekundę. To samo urządzenie nadzoruje też pracę wszystkich elementów aktywnego układu kierowniczego i w razie wystąpienia usterek wprowadza stosowne procedury zastępcze.
Funkcje dodatkowe
Aktywny układ kierowniczy realizuje nie tylko omówione uprzednio funkcje kinematyczne, lecz także uczestniczy w stabilizacji jazdy. W tym celu musi być jednak dostosowany do konkretnego modelu samochodu i odpowiadać celom stawianym przez jego producenta.
Zaletą systemu ZF Aktivlenkung jest zdolność współpracy z pozostałymi funkcjami poprawiającymi bezpieczeństwo jazdy. Można dzięki temu korygować dynamikę jazdy nie tylko poprzez wpływanie na funkcję stabilności kierunku jazdy ESP, lecz również przez wykorzystanie układu kierowniczego do kompensacji momentu żyroskopowego (rys. 7), pojawiającego się na łukach drogi. Służące temu ingerencje w układ kierowniczy są bardzo szybkie i ledwie wyczuwalne dla kierowcy.
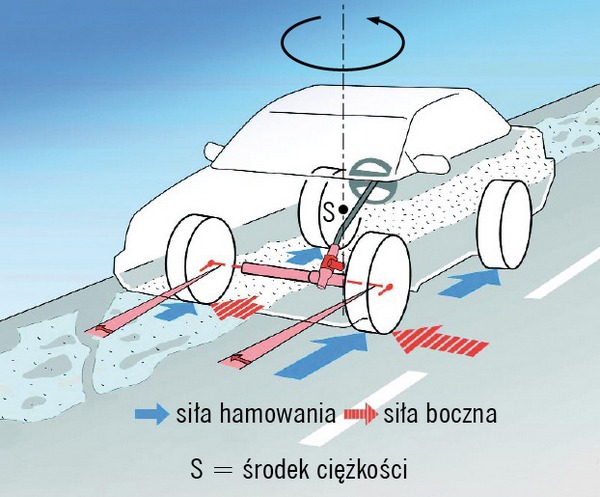
Rys. 7. Schemat powstawania momentu żyroskopowego i jego kompensacja
W przyszłości przewiduje się rozbudowę systemu o funkcje np. kompensacji zakłóceń toru jazdy lub wspomaganego parkowania z wykorzystaniem zmian przełożenia przekładni kierowniczej w pierwszym wypadku do szybkiej jazdy po łagodnych łukach (rys. 6), a w drugim – do wykonywania skrętów o minimalnych promieniach. Inną możliwością jest okresowe zwiększanie szybkości reakcji układu kierowniczego na polecenie kierowcy.
Według najnowszych koncepcji całkowicie zintegrowanego sterowania wszystkimi funkcjami pojazdu odpowiednie czujniki mają rozpoznawać krytyczne sytuacje drogowe i dostarczać informacje o nich do centralnego sterownika, a ten, po dokonaniu błyskawicznej analizy, będzie uaktywniać wybrane systemy, takie jak ESP, ZF-Aktivlenkung lub ABS – dla zapewnienia maksymalnie bezpiecznego poruszania się samochodu.
Leszek Stricker i Wojciech Ambroszko
Politechnika Wrocławska
Artykuł opracowano na podstawie materiałów
ZF-Aktivlenkung für PKW der Mitel- und Oberklasse

0 komentarzy dodaj komentarz